


2018.4.18
人とロボットが相互協力!安全かつ効率的な消化活動を目指す消防最前線
「消防庁消防研究センター」特別上席研究官 天野久徳【後編】
消防隊員が危険にさらされることなく、安全に危険地帯での消火活動を可能にする消防ロボット隊開発の実情。後編では、来年度中の実戦配備を目標に日々改良が進められている最新ロボットの極めて効率的なオペレーションについて徹底解説する。
スペシャルな機能を搭載した4機の連携プレーがカギ
【前編】で紹介した4機の消防ロボットたちは実際の火災発生現場でどのような手順で活動するのだろうか──。
※【前編】の記事はこちら
天野氏はモニターに石油コンビナート火災でのオペレーションを想定したCG映像を映しながら解説してくれた。
最初に、火災事故が発生した現場から十分離れた安全な場所にコンテナを載せたトラックが到着。コンテナの中には、4機のロボットを含むシステムすべてが集約されている。コンパクトなユニットとしたのは、あらゆる災害発生現場に対応できるようにするため、また配備の効率を見据えてのことだ。
「ロボットたちのオペレーションに必要な人間は最低で2人、確認者を含めても5人と、最小限の人数で運用できることを念頭に開発しています。部隊はコンビナート火災などに対応するための専門の教育を受けている消防隊員たちです」

-
1台のコンテナに全てのロボットと中央システムを格納できる、機動力の高さも消防ロボットシステムの特徴だ

ロボットたちは連続して10時間稼働することができ、その間、コンテナは司令塔として機能する。消火活動がさらに長時間におよぶ場合には、ここでバッテリー交換も行う。最小限のエネルギーで最大の効果を発揮するパッケージだ。
まず飛行型偵察監視ロボットが飛び立ち、上空から熱画像カメラなどで大まかな状況を監視すると、次に走行型偵察監視ロボットが出動。火災発生現場までの経路を探索し、情報を中央システムに送る。放水砲ロボットが確実に現場まで到着できるか、経路の状況を隈なく調べるのが目的だ。
「偵察監視ロボットがレーザースキャナーやカメラ、各種センサーで読み込んだ情報は自らが活動するためだけでなく、中央システムに取り込まれ、分析して他のロボットの活動に反映されます。これは私たちが協調連携と呼んでいるもの。目に見えるロボットは4機ですが、中央システムを5つ目のロボットと見なすこともできますね」
-
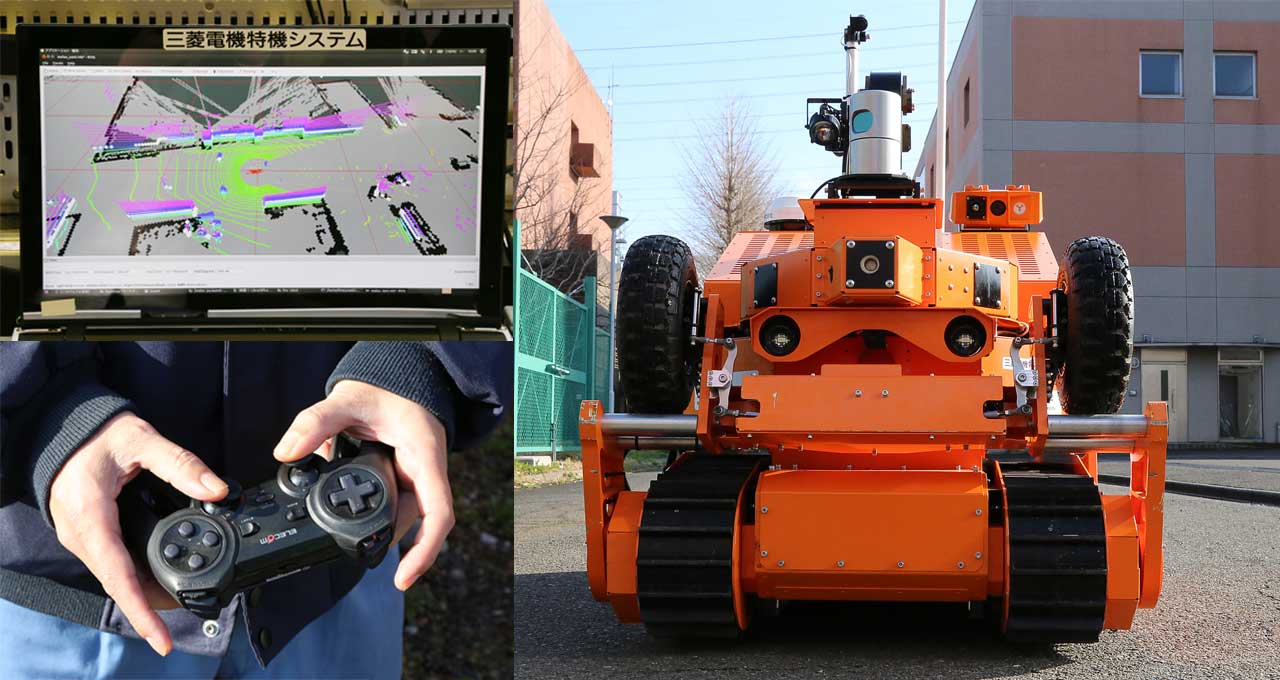
放水砲ロボットの移動ルートを探査する走行型偵察監視ロボット。瓦礫が散乱している不整地などでは、通常のタイヤ走行モードからクローラー走行モードへと変形する。大きな段差に対してはアームごと回転させるアクションで乗り越えることも可能だ

-
走行型偵察監視ロボットの前面には可視画像カメラ、熱画像カメラのほか、温度センサー、放射熱センサー、可燃性ガス検知センサーなどを搭載

-
Lidar(レーザー照射により対象物までの距離や形状を測定する装置)で、地形を3Dスキャン。中央システムが三次元地図を作成するのに欠かせない装置だ

これらのロボットは人間がコントローラーを操作して無線で操縦することもできるが、基本的には自律走行を前提としている。その理由を天野氏に尋ねた。
「無線操縦するには目視、あるいはロボットに搭載したカメラからの高解像度映像をリアルタイムで操縦者に送信する必要がありますが、そこまで良好な通信環境は災害現場で期待できません。“映像が届かないから動かない”では使いものにならないので、自律して走る機能を実装しました。ロボットには一定距離ごとに無線LANルーターを置いていく機構も持たせていますが、あくまで中央システムと情報を相互通信するための手段です」
-
LiDARで三次元スキャンした情報とあらかじめ得ていたマップデータなどをマッチングさせ、現地の立体的な地図を作成できる

-
遠隔操縦するためのコントローラーは、ゲーム機のそれと同じ操作方法。若い隊員に好評だという

走行型偵察監視ロボットからの情報を基に計算した経路が提案されると、消防隊員(“単なるオペレーターではない点”がポイント)がそれを判断し、放水砲ロボット、ホース延長ロボットの出動指令を発信する。2機は指定されたルートに沿って移動し、現場に到着。するとホース延長ロボットはホースを延ばしながら同じルートを安全な場所まで引き返す。消防隊員がホースをポンプにつなぎ、放⽔が開始されるという流れだ。
「ホースをつなぐところまでロボットが行うことも技術的には可能ですが、時間とエネルギーを考えると人間がやった方が効率的。消防の現場ではスピードが求められます」
-
偵察監視ロボットがもたらす情報から、中央システムは現地までの放水砲ロボット移動ルートを提案。ただし、最終的に決断するのは人間だ

誰でも操れるインターフェースでなければ意味がない
いずれも特殊な能力を有するロボットであれば、オペレーションにはさぞかし高度な知識が必要なのでは?と想像しがち。だが、実際には専門の技術者が現場に出向く必要はなく、一般的な消防隊員がおよそ2日間のレクチャーで操作を習得できるほど簡易な操作性になっている。
「専門のオペレーターが必要なシステムにしてしまうと、到底、現場に普及させることはできません。もちろん私たちで技術的なサポートはしますが、できるだけ現地の消防隊員だけでロボットを動かし、問題を解決できることが重要です。そのため誰にでも扱えるインターフェースを目指しました。
消防隊員は消火活動に対して高い能力を持った貴重な人材であり、システムからの提案に対して最終的な決断を下すのはあくまで人間=消防隊員です。だからこそロボットの操作に労力を費やすことなく、現場での判断など人間にしかできないことに集中してほしい。容易に運用できるシステムを目指したのは、そうした理由があります」
人間には人間にしかできない領域で能力を発揮してもらう。エネルギーを最大化する方策としてロボット導入を考えるとき、これは極めて重要な視点といえるだろう。
-
隊員が情報を受け取り、判断を下すための中央システム。実戦配備される際にはもっとコンパクトになる予定

開発中の消防ロボットシステムは来年3月に完成させ、その後、石油コンビナート施設などが管轄下にある消防本部に配備する計画を描いているとのこと。将来的には複数のシステムを運用し、日本全国に配備することを目指しているが、まずは最初の実戦投入で高評価を獲得することが直近の目標となる。
-
走行型偵察監視ロボットの開発に携わった三菱電機特機システム株式会社のメンバー(左から森園竜太郎氏、伊藤大介氏、大巖 慶氏)と天野氏

「今回のプロジェクトでは自律制御などの複雑な機能を実装しましたが、仮に現場からこの機能はいらないよ、という判断が下されたら外すかもしれません。私たちにとってロボット技術の研究開発は、あくまで手段。消防活動を現状よりも効率的に行うことが目的です」
ロボットは人間に取って代わるものではなく、人間ができない領域をカバーするためのもの。そう語る天野氏の言葉には、人の命を預かる消防に長年携わってきた重みがあった。
-
この記事が気に入ったら
いいね!しよう -
Twitterでフォローしよう
Follow @emira_edit
text:田端邦彦 photo:安藤康之

-
今回のトップランナー: 天野久徳
あまのひさのり●1964(昭和39)年、神奈川県横須賀市生まれ。大阪府立大学工学部機械工学科卒。消防庁に入庁し、消防研究所(当時)研究官に配属。特殊災害研究室長、火災災害調査部長などを経て、2014年、特別上席研究官に。この間、東京消防庁、千葉大学、米国ワシントン大学に派遣され、2004年に京都大学から博士号を授与される。情報学、特に耐環境性の高いロボットおよびロボットの知能化、協調連携について研究を進めている。
なお、4月20日(金)10:00~16:00にかけて行われる「消防研究センター」の一般公開にて、本記事に登場した走行型偵察監視ロボットも展示を予定。詳しくは消防研究センターHP(下記)を参照。
http://nrifd.fdma.go.jp/