- TOP
- 特集
- ロボットが隣人になる日
- 人間の手が届かない場所へと踏み込むヘビ型ロボット

2017.03.06
人間の手が届かない場所へと踏み込むヘビ型ロボット
ロボットに生物の動きを取り入れた革新的アイデア
「ロボット大国」といわれるわが国において、昨今、その研究の方向性が変化しつつある。それまでは、より精度を高め、よりパワフルで、より速いロボットを追求し、手軽さやコスト削減、エネルギー効率などは二の次だった。しかし、ロボットが人々の生活に密接になってきたことで、今度は“実用性”がキーワードとなってきた。結果、ロボット工学分野における研究は細分化され、よりシンプルなものへと変わってきている。今回の特集では、ロボットの実用化に向けた動きや素材、動力源などから軽量化、コスト削減、エネルギー効率の向上を目指す研究者たちを紹介し、ロボットが本当の意味で“身近な存在”となっていく未来を考える。第1回は、生物の動きを模倣することで無駄な動作を省く、ヘビ型ロボットの研究を行う立命館大学理工学部ロボティクス学科・馬書根(ま・しょこん)教授に話を聞いた。
- 第1回人間の手が届かない場所へと踏み込むヘビ型ロボット
- 第2回
- 第3回
- 第4回
- 「ロボットが隣人になる日」に戻る
ロボットによる自動化への期待
先進諸国が抱える大きな課題である「少子高齢化」。そこから派生する労働力不足を解決する手段の一つとして、近年、大きな注目を集めるキーワードがある。人間が担ってきた仕事をロボットに代替させることで、労働力不足を補おうという、「自動化」だ。
自動化を達成する上でのロボットといえば、これまでは主に産業用ロボット(大規模な製造業の工場などで稼動するロボット)を指すことが多かった。日本が「ロボット大国」と呼ばれるゆえんも、そこに強みを持っていたことが大きいだろう。
ただ最近では、工場以外の社会空間でもロボットを積極的に活用し、自動化を図ろうという動きが活発化し始めている。顧客対応やコミュニケーションに主眼を置くソーシャルロボット「Pepper(ペッパー)」はすでに有名だが、それ以外にも、災害対応やインフラ点検・整備など、「人間の手が足りない」、「人間がやりたくない」、「人間ができない」現場にロボットを導入しようという、研究機関や民間企業の動きが盛んだ。
「研究者たちには今、コストがかからずエネルギー効率も良い、より実用化しやすいロボット技術を開発することが求められてきています」
そう話すのは、立命館大学で教鞭を執る馬書根教授だ。馬教授は生物の優れた機能や動きを応用するバイオミメティクス(生物模倣)分野にて、高い知見を誇る研究者の一人。特に、教授ら研究チームが開発したヘビ型ロボットやその関連技術には、多くの企業や研究機関が注目を寄せている。

-
私たちが暮らす3次元空間(「幅」「奥行き」「高さ」のある空間)をロボットが行き来する場合、「左右」「前後」「上下」という限られた動きしかできなかった。それよりも多くの動きを持つ生物的なロボットを「生物型ロボット」と名付け、馬教授らは研究を進めている

「私は、学生時代に工学の勉強を始めたころから、生物の動きに興味がありました。ヘビには人間のような足も、車のような車輪もありません。しかし、速いスピードで動くことができる。とても不思議で、どうにかその動きを解明できないかと考えたんです」
馬教授は1984年に中国・河北工業大学を卒業。その後、東京工業大学大学院、小松製作所、米カリフォルニア大学などを渡り歩く。米大学では主に群知能(単純な要素が協調して秩序ある行動を生み出す知能)を主な研究テーマとした。
「ちょうど私が日本に来た80年代後半は、日本はバブル期を迎えていました。当時、企業は産業用ロボットなど実用的なロボットの開発に力を注いでいて、私もその研究に参加していたんです。例えば、産業用ロボットの関節を増やして、より使いやすくする研究とかでしたね。ただ、その間も、ヘビロボットに対する興味は失われることがなくて。茨城大学で自分の研究室を持ったときに、あらためてヘビ型ロボットを研究対象として選ぶことにしたんです」
ヘビ型ロボットの研究に集中できる環境を得た馬教授は、ヘビが見せるさまざまな運動様式に着目し、その仕組みを解明する研究を続けてきた。例えば、ヘビは横に体をくねらすことで、人間より速いスピードで動いたり、泳いだりすることができる。こうしたヘビの典型的な運動は“蛇行滑走運動”と呼ばれるのだが、馬教授はその動きや力の使い方をロボットで再現しようと考えたのだ。
「ヘビは、体全体を体幹の沿う方向にスライドさせながら動くんですよ。その動きを研究して、複数の関節ユニットの接続部分の回転運動だけで移動できるヘビ型ロボットの開発を進めてきたんです。このように生物の形や機能を模倣することで、これまで人間には難しかった作業をロボットが代替できるようになるんじゃないかと、期待しています」
人間の手が届かない場所での作業を実現
では、具体的に「人間では難しかった作業」とは何を指すのだろうか。
「ヘビ型ロボットでいえば、まず災害現場やパイプ内点検などでの応用が考えられます。倒壊した建物や、折り重なった瓦礫の隙間など、人間が入れない場所に侵入して作業を担うというものです。また、水回りでの作業にも役立つでしょう。例えば水田では、人間や、車輪が付いたロボットだと沈んでしまいます。しかし、ヘビ型ロボットであれば接触点の圧力が少ないので、水田の上でもラクに移動することができる可能性がある。実際に、最近では養殖現場や海中インフラの点検に水中作業用のヘビ型ロボットを導入しようという動きもあるんです」
-
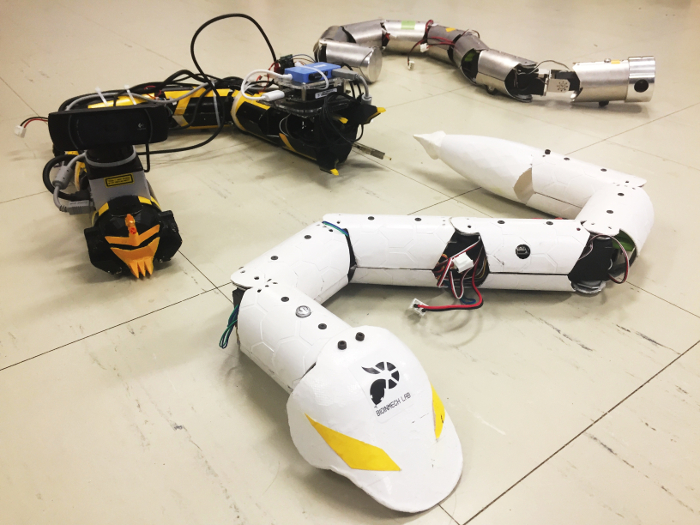
ひと口にヘビ型ロボットと言っても、その形や役割についてはいろいろと試作中だとか
こうして生物の動きや機能をロボットで再現するという研究を進めると同時に、現在では生物の“脳の働き”を解明して、ロボットの制御に生かすという研究も進めている。
従来のヒューマノイドをはじめとする歩行型ロボットは、まず搭載されたセンサーで周囲の情報やデータを収集して、それをコンピューターが処理、その後、各アクチュエーター(モーターやシリンダー、ロボットのアームや足などエネルギーを運動に変換する装置)を駆動させるという制御方法が一般的だ。そのため、ロボットが自律的に動こうとすると、それらのプロセスを処理するまでに時間がかかったり、動き自体が非常に遅くなったりするという欠点があった。
「まだ完全に解明されたわけではありませんが、生物の場合、その脳や動きを制御する仕組みはもっとシンプルなはずなんです。その動作制御をロボットで再現するために、私たちがいくつかの仮説を立てて、研究を進めることにしました。例えば、これまでヘビ型ロボットは、頭に1つのコンピューターを入れて制御しようとするのが一般的でしたが、私たちは各関節ユニットにMCU(神経細胞をまねた単純計算装置)を搭載して、互いに電気信号をやりとりするだけで動く仕組みを研究しています」
ロボットの実用化にはエネルギー効率が重要
馬教授がよりシンプルかつ効率的に動くロボットの開発・研究を進めようとする背景には、冒頭でも述べた通り、ロボットをより直接的な形で、社会の役に立てたいという、強い思いがある。
馬教授は「生物の機能や知能をロボットで再現するというのは、学術テーマ、つまりサイエンス的に非常に重要」と前置きした上で、「それを実用化して、社会に役立てる取り組みも同じくらい重要」なのだと強調する。
「2002年当時、日本政府が数十億円を投じた、災害対応用ロボット開発の国家プロジェクトがありました。私も参加させてもらったのですが、そこで非常に多くのことに気付かされたんです。研究者たちは、センサーやアクチュエーターを使ってロボットの機能自体を上げようとするのですが、それは実際に使用することを想定すると非現実的なものに思えました。というのも、アクチュエーターなどロボットを構成する要素が増えると故障しやすいし、コストも上がる。新しいロボットが社会で実用化されるためには、その2つの要因が大きなネックになっているんです。そのため私たちは、いかに少ない部品でこれまで不可能といわれてきた動きを再現するかを追求し、同時に、より実用的なロボット技術を開発することを大事な研究テーマとしているんです」
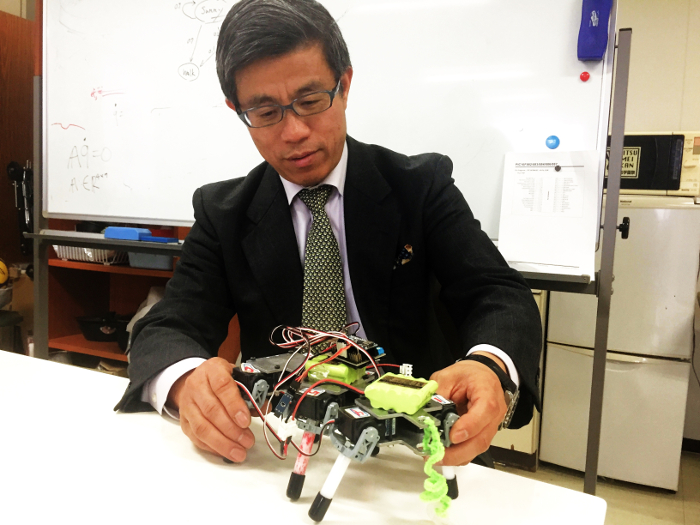
-
環境適応型移動ロボット研究の一環として、多脚歩行ロボットの研究も行っている
実際に社会に役立つロボットを開発するとなると、当然、エネルギーの種類や効率もテーマの一つとなってくる。馬教授は続けて指摘する。
「ロボットの動力源としては、やはり電気とモーターという組み合わせが最も安定しています。ただ、電気とモーターという組み合わせではあまり長い時間使えない特殊な環境もあるので、水や空気圧などほかのエネルギーを選択肢として考えていく必要があります。いずれにせよ、アクチュエーターやモーターをなるべく少なくするなど、他の方法と組み合わせて、最適なエネルギー効率を達成することもロボット研究にとっては重要な課題になるはずです」
実用化できるロボットを作る。すなわち、よりシンプルで効率性の高い、かつ手ごろな価格帯のロボットを生み出す戦いだ。バイオミメティクスとさまざまなエネルギー、そして馬教授ら研究者たちの熱い思いが生み出す「新時代のロボット」の登場に、期待が高まる。
- 第1回人間の手が届かない場所へと踏み込むヘビ型ロボット
- 第2回
- 第3回
- 第4回
- 「ロボットが隣人になる日」に戻る

-
この記事が気に入ったら
いいね!しよう -
Twitterでフォローしよう
Follow @emira_edit
text・photo:河 鐘基(ROBOTEER)

-
ま・しょこん●1963年、中国生まれ。1984年に中国・河北工業大学卒業後、来日。1991年、東京工業大学大学院理工学研究科修了、工学博士。同年、小松製作所研究本部メカトロニクス研究所勤務。茨城大学工学部講師、助教授、立命館大学COE推進機構教授を経て、2008年4月より立命館大学理工学部ロボティクス学科教授。ロボットの機構と制御、生物知能機械学、レスキューロボットなどの研究に従事し続けている。
◆生物知能機械学研究室
http://www.malab.se.ritsumei.ac.jp/jp/
この記事をシェア
- TOP
- 特集
- ロボットが隣人になる日
- 人間の手が届かない場所へと踏み込むヘビ型ロボット