- TOP
- 特集
- ロボットが隣人になる日
- 未来のロボットは筋肉を手に入れる

特集
ロボットが隣人になる日
2017.03.13
未来のロボットは筋肉を手に入れる
必要最低限の機能と効率化をロボットに与える素材研究
工場で使用される産業用ロボットではなく、スーパーや職場、そして私たちの家にロボットがやって来る。そんな未来の実現には軽量化、コスト削減、エネルギー効率の向上が必須だ。ロボット特集第2回では、第1回の生物模倣型ロボットとは違ったアプローチでシンプルな機能を研究する、東京工業大学の鈴森康一教授にロボットを構成する最適な素材について聞いた。
- 第1回
- 第2回未来のロボットは筋肉を手に入れる
- 第3回
- 第4回
- 「ロボットが隣人になる日」に戻る
生物よりもエネルギー効率がいいロボット
「人間の筋肉はエネルギー効率が極めて悪いアクチュエーター(駆動装置)ですよ」
東京工業大学で知能機械学・機械システムを研究する鈴森康一教授は、そう指摘する。
「例えば“空気椅子”を思い浮かべてください。人間が屈んだ状態で止まっている場合、力学的な仕事はゼロですが、姿勢を維持するためには多くのエネルギーが必要です。しかしこれがロボットなら、ギアを固定するだけなのでエネルギーは必要ありません。人間は、筋肉があるだけで、何もしなくても大量のエネルギーを消費してしまう生き物なのです」
人間を含む全ての生物の体内では、生命活動を維持するためだけに必要なエネルギー消費、つまり「基礎代謝」が行われている。人間の1日のエネルギー消費量の約6割は、この基礎代謝だと言われているのだ。しかも、人間が出し得る最高出力は0.3馬力程度であり、出力も極めて小さい。動いてもいないのに、エネルギーの半分以上を消費し、いざ動いたと思ったら大したパワーも出ない…そんなロボットがあれば、「失敗作」の烙印を押されていることだろう。
このような中で、問題解決のツールとして注目されているものこそが鈴森教授が研究するアクチュエーター・人工筋肉だ。
メーカーからの依頼で生まれた人工筋肉
「6年ほど前に岡山大学で勤務していたとき、韓国のサムスン電子から『小さくて細いロボットを作りたいので、狭いところに組み込めるモーターを作ってほしい』と依頼されたのが、人工筋肉を研究するきっかけでした。いろいろ考えた末、行き着いたのが岡山県の組みひも技術を用いたマッキベン型人工筋肉です」
鈴森教授が研究する人工筋肉は、特殊なマテリアルで筋細胞を生成するといったSFチックなものではない。極論すれば、ゴムチューブとひもだけで人間の筋肉を模倣しようという技術で、原理も極めてアナログだ。
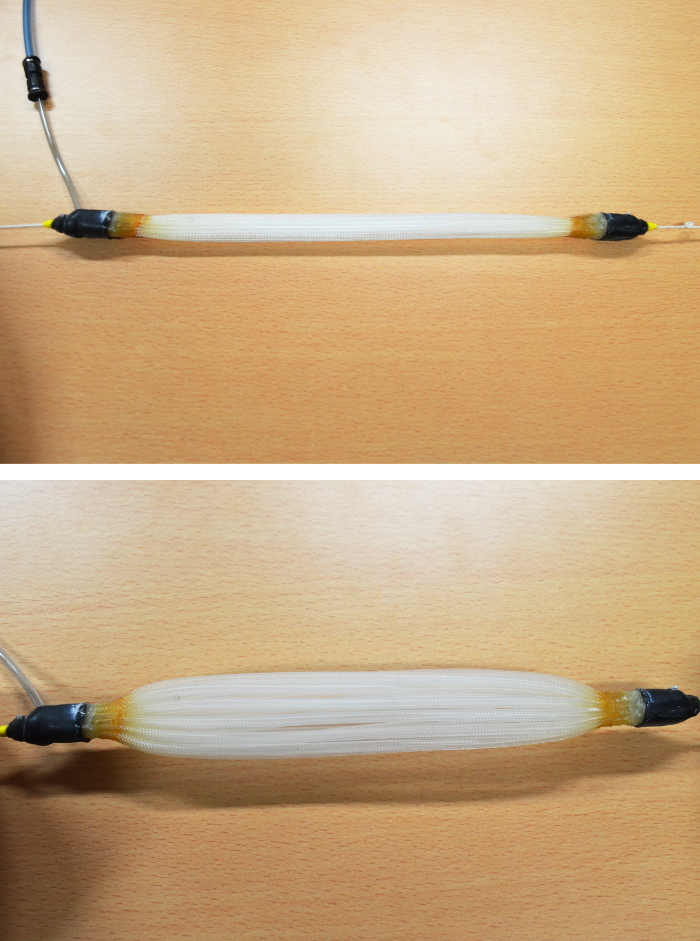
ゴムチューブに空気を入れると、径方向に膨らむ。このチューブをメッシュ状の筒で覆うと、径方向の膨張力が長手方向の収縮力に変換されるという原理をアクチュエーターとして活用したものが、マッキベン型人工筋肉だ。マッキンベン型人工筋肉とは、1960年にアメリカで開発され、すでに製品化されている。鈴森教授はこの人工筋肉の外径を細くするなどの改良を施し、人の動きの特徴である“しなやかさ”を再現できるようにしたのだ。

-
上は空気圧を加える前、下は空気圧を加えた後の人工筋肉。人工筋肉を衣類などに組み込むことで、人の動きをサポートする
小さなエネルギーを上手にコントロール
鈴森教授は、この“しなやかさ”こそが、ロボットが人と接する、ひいてはロボットを人間に近づける上で重要な要素だと説く。鈴森教授の研究室は成果を動画で公開しているが、その中で最も多く視聴されたのが、骨格標本に人工筋肉を取り付けた映像だ。
人間の足は、股と膝、足首の3つの関節からなり、それを50の筋肉が連動して動かしている。この筋肉全てを人工筋肉に置き換えたところ、「ロボットダンス」とやゆされるギクシャクした動きではなく、人間のようなしなやかな動きとなった。
「ワットによる蒸気機関の発明以降、科学技術は『力』と『速度』と『精度』の3つを向上させることを追求してきましたが、人工筋肉はそのいずれも出せません。つまり、人工筋肉は科学技術が目指した価値観と真逆にあるものなのです。人と接するロボットを考える上では、これまでの技術では不十分なんです。むしろ、小さなエネルギーを上手に、優しくコントロールする技術が必要なのです」
鈴森教授が今、人工筋肉を使って実用化を目指しているのが、人の動きをアシストするために用いる「パワースーツ」の一種である「サポートスーツ」だ。モーターで動く金属骨格が強靭な力で補助してくれるパワースーツとは異なり、「使用者の体をサポートする程度の力しか発揮しない」ものだという。しかし、果実の受粉や工場での組み立てなど腕を長時間上げたまま行う作業など、軽さと適度なパワーを必要としている現場も少なくない。人工筋肉はそこに空気を送り込むだけでパワーに換えられるわけで、エネルギー効率の良さにも期待が集まる。
そしてもう一つ、鈴森教授が今、独自に開発を進めているのが、「ジャコメッティロボット」だ。この聞き慣れない名前は、針金のように細く引き伸ばされた人物彫刻で知られるスイスの彫刻家、アルベルト・ジャコメッティにちなんだ鈴森教授の造語である。
これまで開発されてきたロボットは、高機能化・高性能化を目指していたため、その代償として、重量化、高価格化、システムの複雑化を招いた。しかし、ジャコメッティロボットは作業に必要とされる最低限の、本質的な機能のみで構成されるため、軽量かつスリムという特長を持つ。
高機能・高性能な従来のロボットの大半はかなりの重量があり、転倒でもすれば、高額の製造費が吹っ飛んでしまうばかりでなく、周囲の人間に大ケガを負わせる危険性もある。一方のジャコメッティロボットは、軽量で柔軟なため、たとえ人の上に落ちてきたとしてもケガをする心配はほとんどないそう。
その用途については、例えばヘリウムを充塡したフィルム風船と人工筋肉で作られた超軽量・超長尺ジャコメッティアームの場合、「墜落や衝突しても周囲を破損させないため、廃炉原発の内部調査などにも活用できるのではないか」と、鈴森教授は期待を寄せる。
燃料電池の搭載から見える可能性
軽量かつ安全、必要最低限の機能を備えたロボット。期待値が高まる鈴森教授の研究だが、当然ながら、今後改善していかなければならない点もある。その一つが、動力源となるエネルギーそのものの供給問題だ。
サポートスーツの一つである補助グローブのような製品であれば、動力源は小さなガスボンベでも十分。しかし、組立作業用のサポートスーツやジャコメッティロボットには、外部に大型のコンプレッサーが必要となる場合もある。
この問題の解決こそが、“小さなエネルギーを上手に優しくコントロールする”技術を実用化するための最終関門なのかもしれない、と鈴森教授も言う。
-
人工筋肉を組み込んだサポートグローブ。介護の現場などでの活用が期待されている

燃料電池の搭載から見える可能性
「人が装着したり、長時間の作業をしたりすることを可能にするためには動力源をどうすべきか。私たちはその問題を解決すべく、人工筋肉自体を燃料電池化することについても研究を進めています。ゴムチューブの中に水を満たし、燃料電池化された人工筋肉は、それ自体が発電するので、エネルギー回生が可能です」
その仕組みはこうだ。電気分解された水が水素と酸素に分かれることで体積を増し、人工筋肉を収縮させる。次に、水素と酸素を電気化学反応させて水にすると人工筋肉は元の状態に戻る。この過程で電気が発生するため、エネルギーとして回収することができる。まさに、夢の機関ではないだろうか。
燃料電池は、化石燃料の次に来るエネルギーとして、自動車業界で実用化に向けた動きが盛んな技術。これが人工筋肉にも応用され、そして、人工知能と結びつけば、人間に見間違うほどのしなやかな動きを持つあの“鉄腕アトム”が現実世界に現れる日もそう遠くないのかもしれない、と鈴森教授は目を輝かせた。
- 第1回
- 第2回未来のロボットは筋肉を手に入れる
- 第3回
- 第4回
- 「ロボットが隣人になる日」に戻る

-
この記事が気に入ったら
いいね!しよう -
Twitterでフォローしよう
Follow @emira_edit
text・photo:山野一十
-
すずもり・こういち●1959年生まれ。1990年、横浜国立大学大学院工学研究科博士課程修了。東芝総合研究所(現:研究開発センター)、一般財団法人マイクロマシンセンターでの勤務を経て、2001年より岡山大学にて教鞭をとる。2014年より、東京工業大学教授。現在は、人工筋肉を製品化するためのベンチャー企業「エスマスル」を立ち上げ、同代表も務めている。2017年1月には、内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジの一環として、株式会社ブリヂストンと共同で、油圧駆動のハイパワー人工筋肉の開発に成功した。
この記事をシェア
- TOP
- 特集
- ロボットが隣人になる日
- 未来のロボットは筋肉を手に入れる