

2022.7.27
燃料デブリの試験的取り出しへ。福島で進む格納容器内部調査用ロボット開発
2号機格納容器内部調査と燃料デブリの試験的取り出しを目的としたロボット開発の進捗
福島第一原子力発電所の廃炉に向けた大きな一歩が、いま踏み出されようとしている。現在、福島県楢葉町では燃料デブリの試験的取り出し装置の調整や、操作訓練が行われている。本プロジェクトに携わる三菱重工業株式会社(以下、三菱重工業)と東京電力ホールディングス株式会社(以下、東京電力HD)の担当者2人に、試験的取り出し作業の重要性と遠隔操作技術が果たす役割を聞いた。
廃炉作業の最難関「燃料デブリ」の取り出し
3号機、4号機の使用済燃料の取り出しが完了するなど、着実に進む福島第一原子力発電所の廃炉作業。しかし、1号機、2号機、3号機の原子炉格納容器内には燃料デブリを含んだ堆積物が存在する。燃料デブリとは核燃料と原子炉内の構造物が溶け落ち、冷え固まったもの。
2011年の事故以来、さまざまな原子炉格納容器内部調査が行われてきたが、2019年の調査では2号機の堆積物に初めて接触し、動かせることが確認できた。これまでの調査結果を踏まえ、安全性や確実性などを鑑みた結果、政府は2021年内に2号機でデブリの試験的取り出しに着手し、本格的な取り出しへと進むことを決定したのだ。(現在はコロナ禍の影響により試験的デブリ取り出し開始目標を2022年に延期)

-
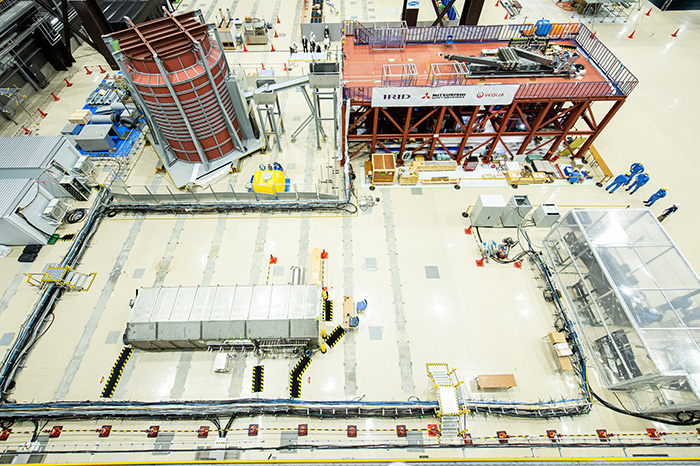
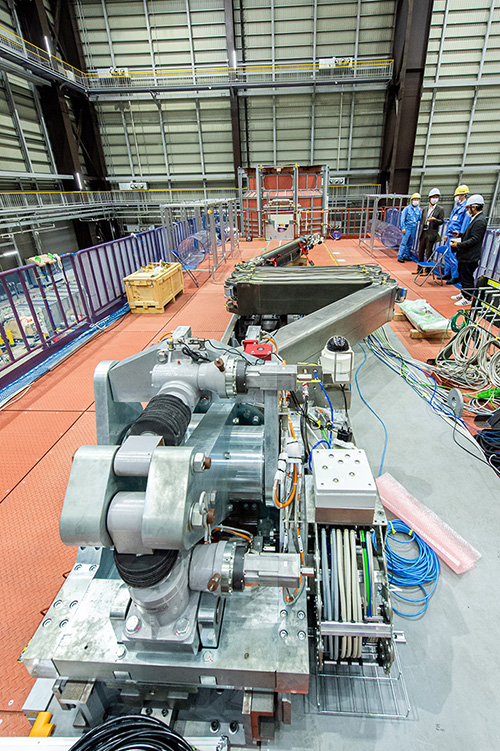
日本原子力研究開発機構(以下、JAEA)楢葉遠隔技術開発センターに造られた2号機のモックアップ(原寸大の模型。写真左上)とロボットアーム(右上)。ここで研究開発が日々進められている
「2018年、2019年に行われた2号機原子炉格納容器内部調査結果を踏まえ、放射性物質が外部に漏れないように燃料デブリを回収するなどの安全性や確実性などを考慮した結果、今回はロボットアームによる回収となりました。当社はその開発を担当しています」
そう話すのは、三菱重工業 原子力セグメント新型炉・原燃サイクル技術部主席技師の辻田芳宏さんだ。三菱重工業は英国の企業と共にロボットアームを開発。英国を主体に開発されていたが、コロナ禍の影響により試験的取り出しは2022年へ延期に。ロボットアームは2021年7月に日本へ運び込まれ、三菱重工業がその仕上げや検証を担っている。
-
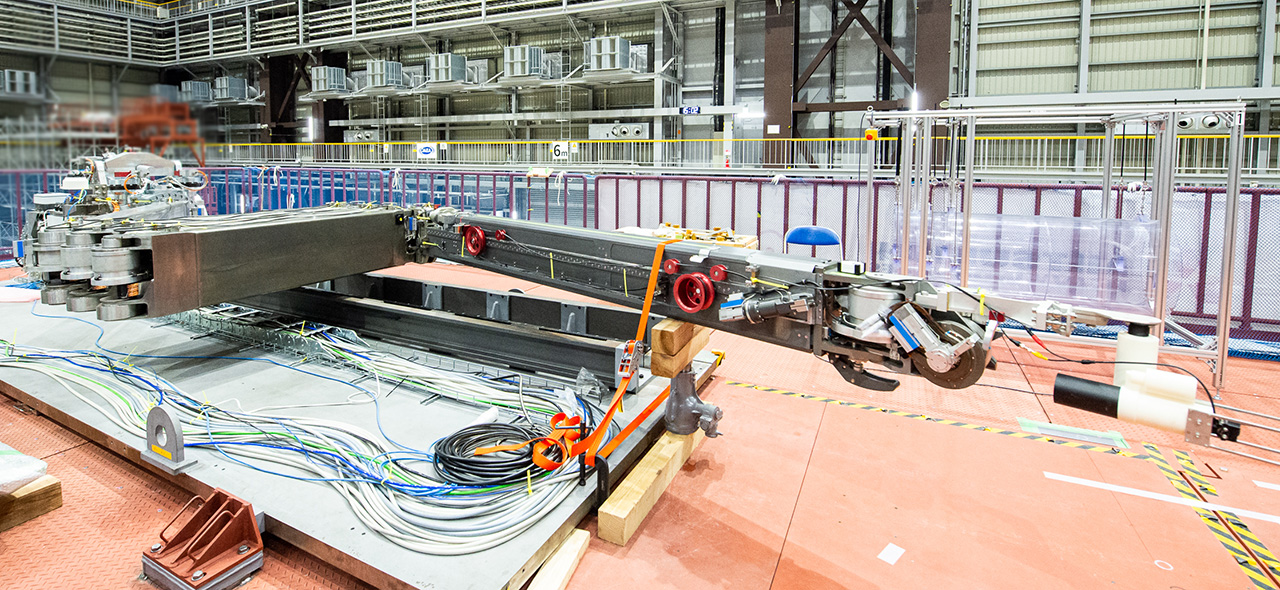
蛇腹状に折り畳まれており、伸ばすと全長約22mになるアーム
長大なアームは「エンクロージャ」という巨大な金属製の箱に折り畳まれた状態で格納されている。エンクロージャは、試験的取り出しのルートの入り口となる原子炉格納容器貫通部「X-6ペネトレーション」(以下、X-6ペネ)に接続され、燃料デブリが確認された原子炉格納容器の底までアームを伸ばす仕組みだ。しかし、そこに最初の課題があった。
「通常、距離が長ければ安定性を担保するためにアーム自体を太く、大きくします。しかし、X-6ペネの直径は約60cmととても狭い。アームは長ければ長いほどたわむので、X-6ペネを通過できるよう余裕を持って細くすると、強度の面で目的の場所に到達できなくなる可能性があります。高強度ステンレス素材を使っていますが、ギリギリのバランスで設計しました」(辻田さん)
-
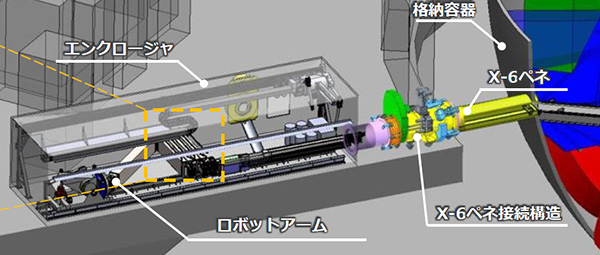
エンクロージャの中からロボットアームを伸ばし、X-6ペネを通す位置関係
出典:廃炉・汚染水対策関係閣僚等会議『東京電力ホールディングス(株) 福島第一原子力発電所の廃止措置等に向けた中長期ロードマップ』(2019年 12 月 27 日)より
積み重ね研鑽してきた自動・手動ロボットの連携
ロボットアームは現在、福島第一原子力発電所の近くに位置するJAEA楢葉遠隔技術開発センターで、2号機の実寸大の模型による検証を行っている。ロボットアームを伸ばした際のたわみや誤差を確認するためだ。
「ロボットアームの挙動はプログラミングで自動的に制御する仕様です。アームの先端に取り付けたカメラセンサーのほか、レーザースキャナーセンサーを搭載し、3Dデータをバーチャルリアリティー(以下、VR)化して確認しながら進めます。原子炉内に据え置きのカメラを設置できれば、アームの位置情報やたわみを客観的に確認できるのですが、高い放射線の影響もあるため、カメラは原子炉格納容器内に設置できないので頼りになるのはVRの情報とアームに搭載したカメラ映像になります。アームの位置情報の精度を実寸大の模型で検証、修正を重ね、現在ではアームの揺れは、左右20mm程度にまで抑えました」(辻田さん)
-
アームの開発を担う三菱重工業の辻田さん。アームの先端に設置されたカメラセンサーなどが操作補助を担う
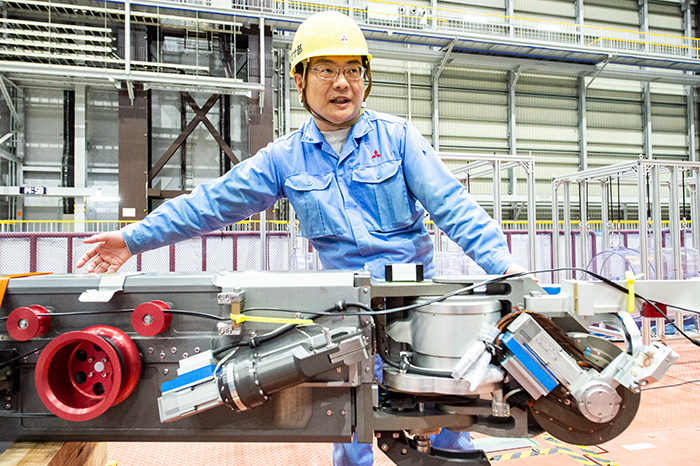
アームの先端に設置されるツールは、双腕マニピュレータで付け替えられている。その作業内容について、東京電力HDの燃料デブリ取り出しプログラム部遠隔オペレーションPJグループに所属する猪戸智和さんが説明する。
「今回の2号機格納容器内部調査・試験的取り出しでは、アクセスルートを構築するためのウォータージェットツールや格納容器内部の形状や放射線量を測定するための各種センサー、試験的デブリ取り出し装置といった様々なツールがあります。これらはエンクロージャの中にある双腕マニピュレータをコントロールルームから遠隔操作し、作業ごとにツールを付け替えます」
-
ロボットアームが内部に設置されるエンクロージャの実物
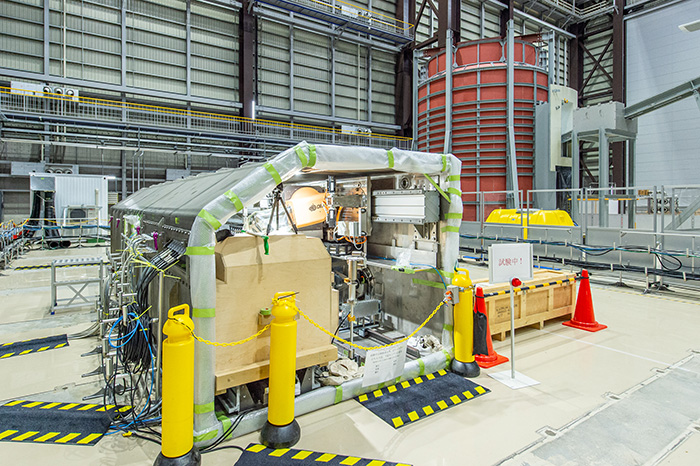
原子炉格納容器内の燃料デブリに到達するために必要なアクセスルートの構築では、ケーブルなどの障害物があるためウォータージェットツールを用いて切断除去する必要がある。
ここで重要になるのが、センサーやツールの付け替えだ。エンクロージャ内は放射線量が高くなるため、人が中に入って付け替えることはできない。この作業は2本の腕を持つロボット、双腕マニピュレータを遠隔操作して行われる。
双腕マニピュレータは、放射線量の少ない別の場所にあるコントロールルームにその操作機があり、操作機を動かすとエンクロージャの中にある双腕マニピュレータも同じ動きをするという仕組みだ。
-
コントロールルームで操作機側の双腕マニピュレータを操作する東京電力HDの猪戸さん

-
コントロールルームで操作すると、エンクロージャの中にある双腕マニピュレータが連動する
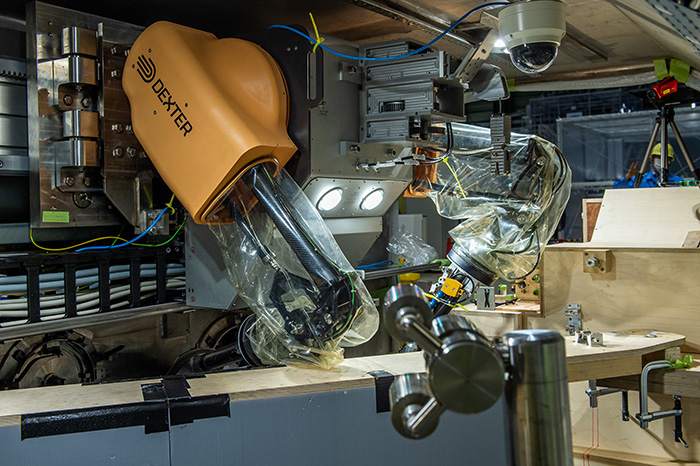
双腕マニピュレータの操作はコントロールルームからカメラ映像を見て遠隔操作するため非常に難しい。その操縦者である猪戸さんは言う。
「双腕マニピュレータはエンクロージャ内に設置されたカメラの映像をコントロールルームのモニタを見ながら操作します。しかし、そのカメラも数が限られており、見えている映像から位置や角度を頭の中で変換しながら操作する必要があります。例えば、通常の作業姿勢ではなく前後反転して作業を行う場合、カメラ映像では逆に動くため、注意して操作する必要があります」(猪戸さん)
-
双腕マニピュレータは重量がある物やケーブル・コネクタなど精密な物も取り扱うため、作業によってフォーススケール(操作力の倍率)を変更する

視界の悪さだけでなく、エンクロージャの狭い空間の中では、双腕マニピュレータの動きも制限される。猪戸さんは、昨年から双腕マニピュレータの作業性検証と共に操作訓練を行っているが、そのハードルの高さを痛感しているという。
「双腕マニピュレータ操作は制限された可動域に注意しながら各種ツールの取り付けや、位置変更が可能な環境カメラの移動を実施します。また、カメラの視界も制限されるため、非常に操作しにくい環境の中でコネクターの接続やドライバーでのボルト締めなどの繊細な操作も行わなければなりません」(猪戸さん)
燃料デブリのある原子炉格納容器内に到達するまで、多くの障害がある。燃料デブリの回収はどう行うのだろうか。
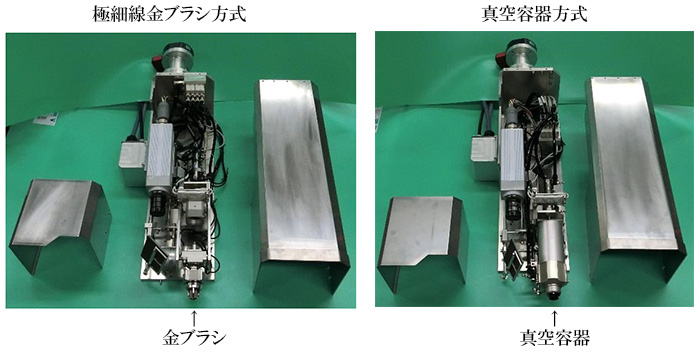
「まず燃料デブリに到達するまでにアクセスルートの構築や格納容器内部環境データの測定が必要です。それらの格納容器内部調査を行ったあとに試験的デブリの回収に取りかかる予定です。試験的取り出しのデブリ回収装置は金ブラシをデブリに直接押しつけて粉状のデブリを回収する案と注射器のように真空容器へ吸い込む案の2種類があります」(猪戸さん)
-
アームの先端に設置されるデブリ回収装置のプロトタイプ
出典:技術研究組合 国際廃炉研究開発機構「原子炉格納容器内部詳細調査技術の開発(X-6ペネトレーションを用いた内部詳細調査技術の現場実証)」令和2年度最終報告(令和3年 3 月)より
今後の行方を占う試験的取り出し作業の重要性
今回の試験的取り出しで得られるのは、デブリ分析によって得られる情報だけではない。前述したように燃料デブリ到達までの道筋が、非常に重要だと辻田さんは言う。
「デブリの分析情報は必要不可欠ですが、それだけではなく格納容器内の細かい映像録画や、レーザースキャンによる採寸なども行います。それらの情報は今後の装置の設計に反映されるため、非常に重要な役割を持っているのです」(辻田さん)
もう一つ、今回の試験的取り出しでは大きな成果が得られる。
「一度到達できれば、成功例のプログラムデータが手に入ります。2回目以降は、すでに入手したプログラムデータを活用することで半自動かつ短時間で調査できるようになります。これまであれほどの大きなロボットアームを格納容器内部に入れたことはありません。ですから、初回は非常に慎重に行う必要があり、何よりも重大な責任があると感じています」(辻田さん)
-
三菱重工業の辻田さん(右)は技術者として、東京電力HDの猪戸さん(左)は操作者として、JAEA楢葉遠隔技術開発センターで日々、ロボットアーム開発に共同で取り組んでいる
あらゆるシチュエーションを想定し、ロボットアームの調整や操作手順の修正、またその訓練など、高い安全性と品質を追求している今回のプロジェクト。最後に2人にその思いを聞いた。
「ロボットアームが日本に届いて以来、様々な検証を行ってきました。しかし、非常に繊細な動きを求められるため、遠隔操作の担当者からの口頭での説明や文章だけのフィードバックをいただいても、挙動や感覚のニュアンスが分かりません。ですので、本プロジェクトでは三菱重工業のエンジニアも楢葉に来て、東京電力HDのオペレーターの皆さんと一体になって改善に努めています。当社はこれまで長年、原子力事業に携わってきました。原子力に関わる企業として、廃炉を進めていくために会社を挙げて本プロジェクトを進めています」(辻田さん)
「私は震災時には3号機と4号機の運転に関わっており、その後も1号機から4号機のプラントの安定化設備の管理業務に従事していました。プラントの運転や管理業務も誇りを持って取り組んできた一方、福島の復興に必要な、福島第一の廃炉作業の加速に直接関連する業務にも携わりたいという気持ちで、本プロジェクトに参加しました。本プロジェクトには、当社から9名のメンバーが遠隔操作オペレーターとして参加しています。デブリの取出しを可能な限り早く安全に実施することで、地域の方々のご不安を少しでも取り除くことができるよう、三菱重工業の皆さんとメンバー一丸となり対応しています。本プロジェクトが廃炉完遂に向けた大きな一歩となるよう訓練を積み重ね、成果を出したいと思っています」(猪戸さん)
JAEA楢葉遠隔技術開発センターでは、2号機格納容器内部調査と試験的デブリ取り出しに向け最善かつ最大の準備を日々続けている。

-
この記事が気に入ったら
いいね!しよう -
Twitterでフォローしよう
Follow @emira_edit
text:クジライタカマサ photo:野口岳彦