2018.1.18
クモヒトデから着想!東北大学が故障をものともしない5本腕の移動型ロボットを開発
故障などの“想定外を想定するAI”も実現可能に?
東北大学の研究グループは2017年12月14日、想定外の故障に対して即座に適応できる移動型ロボットに世界で初めて成功したと発表。生物の動きや構造などから着想し、複雑な動きを再現する──。ロボットの新たな動力エネルギーとしてその可能性を広げる科学技術の新事情をお届けする。
INDEX
開発のヒントは奇妙奇天烈な海の生物
これまでロボットなどの人工物は、設計時に想定した稼働環境において、高いパフォーマンスを発揮するよう最適化した設計が行われていた。しかし、この“最適化した設計”が、現在の人工物が抱える脆弱性の根源的な理由の一つにもつながっている。例えば、機械の一部が故障してしまうといった想定を逸脱した状況に陥ると、本来発揮すべきパフォーマンスが劇的に低下してしまう恐れがあるのだ。
そこで近年では、生物の構造や機能などにヒントを得た、新たな技術開発やものづくりに生かすバイオミメティクス(生物模範)への注目が高まっている。
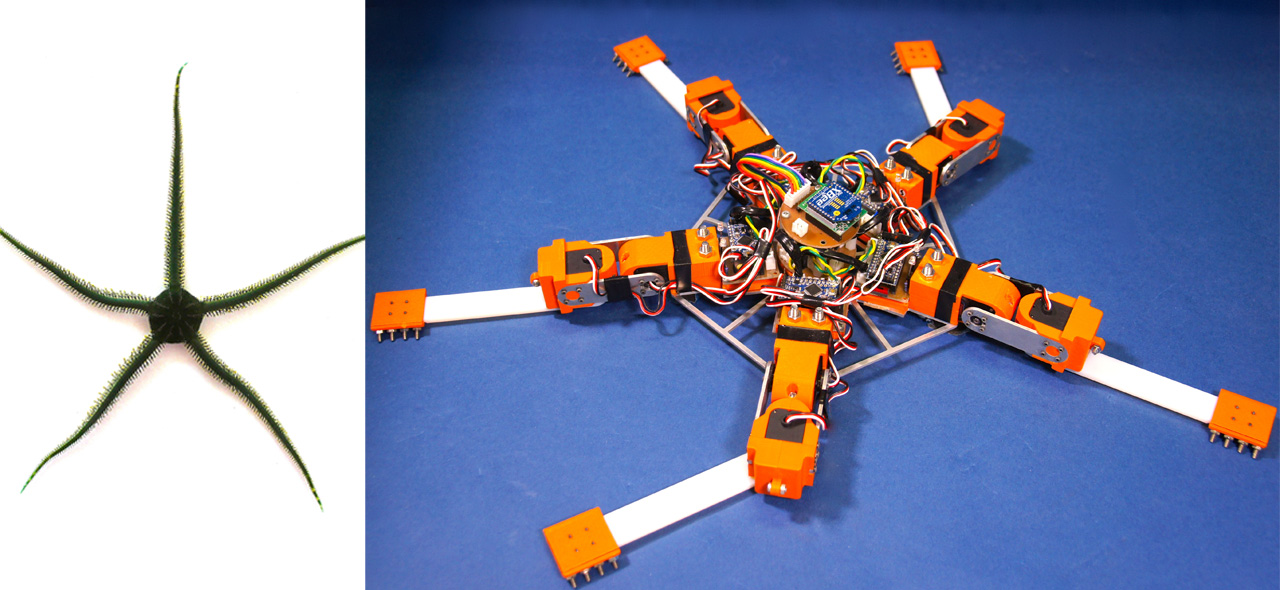
今回、想定外の故障にも即座に適応する移動ロボットを開発したのは、東北大学電気通信研究所の石黒章夫教授や加納剛史准教授をはじめとする研究グループ。彼らが注目したのは、原初的な棘皮動物(きょくひどうぶつ/五放射相称の身体構造で、進行方向を決めるような前後左右の体軸を持たないウニやナマコなどの動物)であるクモヒトデだ。

-
種によっては水深500m以上の深海に生息するクモヒトデ。ヒトデと異なり、移動に管足(かんそく/棘皮動物に見られる体表に多数存在する器官)を使わないという特徴がある
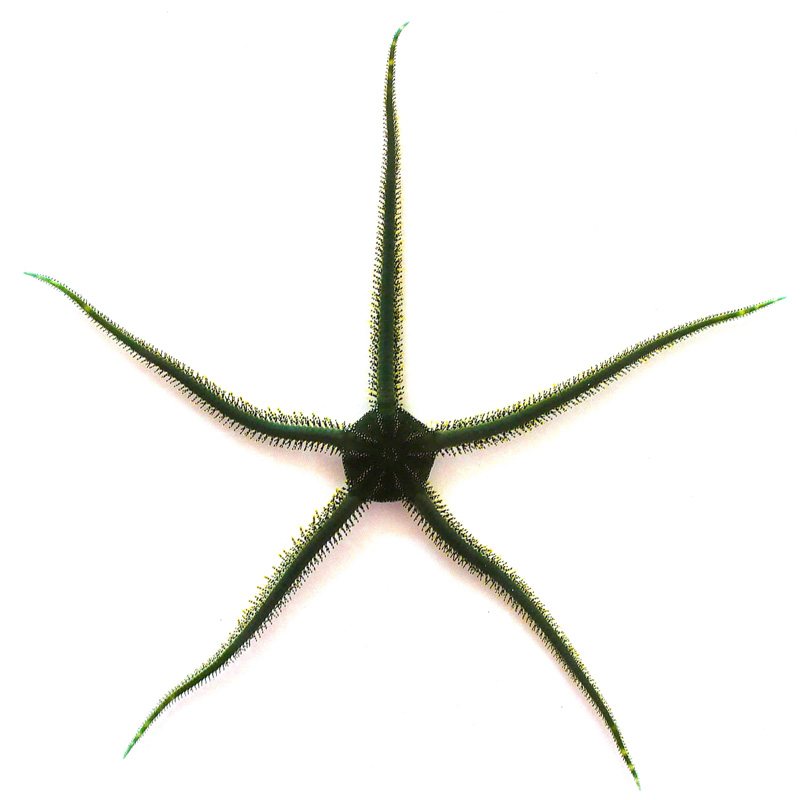
クモヒトデは柔軟な腕(わん)を足として使い海底をはって移動するが、敵に襲われると腕を自ら切り落とし、残存する腕の本数に応じてほぼ瞬時に適切な運動パターンを作り出して逃げ回る。つまり“耐故障性”を有するという特徴がある。
腕を自ら切り落とす=自切(じせつ)し、かつ単純な神経系しか持たないクモヒトデに同研究グループが注目した理由は、現在の人工物の設計指針である“壊れないように設計する”ではなく、“壊れてもなんとかなるように設計する”という設計原理が内在しているのでは?と考えたためだ。
そこで、「クモヒトデの持つ困難な状況下に適応する力から、レジリエント(回復・復元)な人工物設計の仕方を学び、“壊れてもなんとかなる”タフでしたたかな人工物の構築原理を考察したい」と研究をスタートさせた。
-
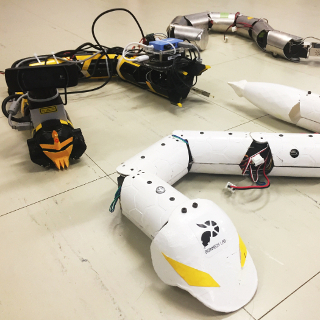
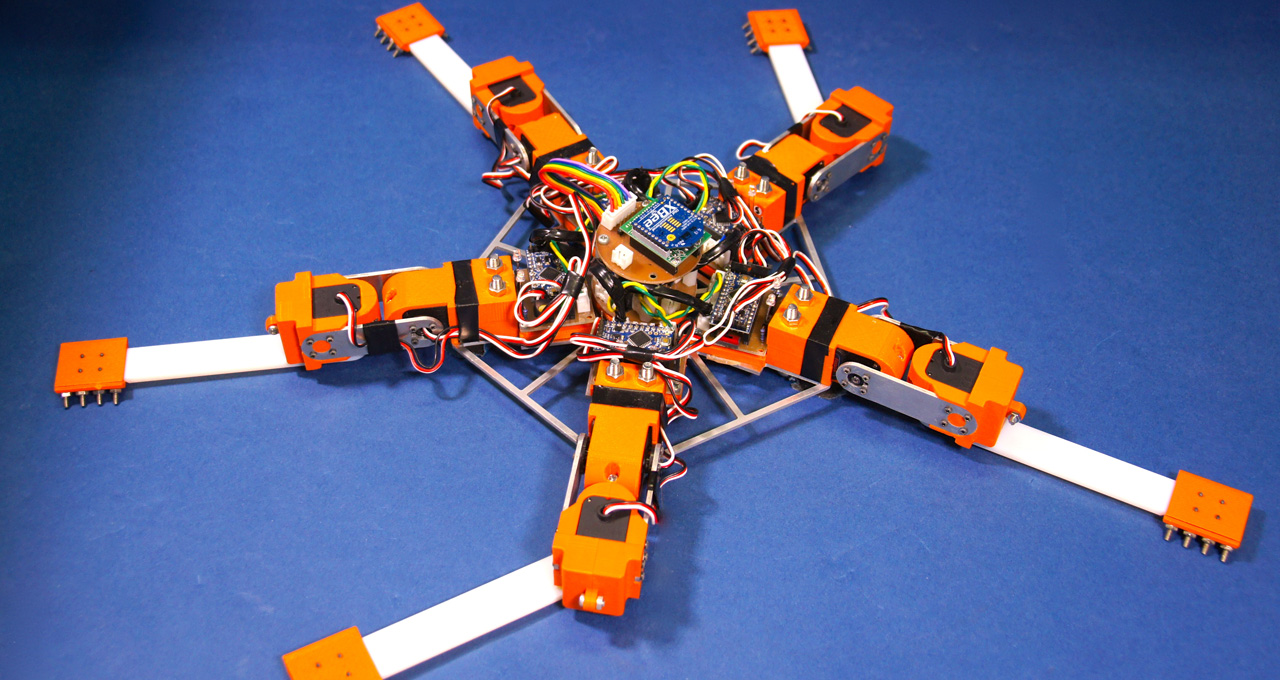
同研究グループが開発したクモヒトデ型ロボット「PENTABOT II」

前述の通りクモヒトデは自切後、その状況に対してほぼ瞬時に適応する──。
この“ほぼ瞬時”に行われるというのが重要なポイントだ。
-
クモヒトデの全体像および自切後に推進する動き(画像上)。今回開発したクモヒトデ型ロボットと、腕を破壊したときのロボットの運動のようす(画像下)

-
クモヒトデ型ロボット開発までのプロセス
これまで人工物において、さまざまな学習や適応アルゴリズムが提唱されてきた。しかし今回の研究では、制御系の意図と環境からのレスポンスの整合性に着目することで、ほぼ瞬時に行われる適応プロセスが見事に再現されている。
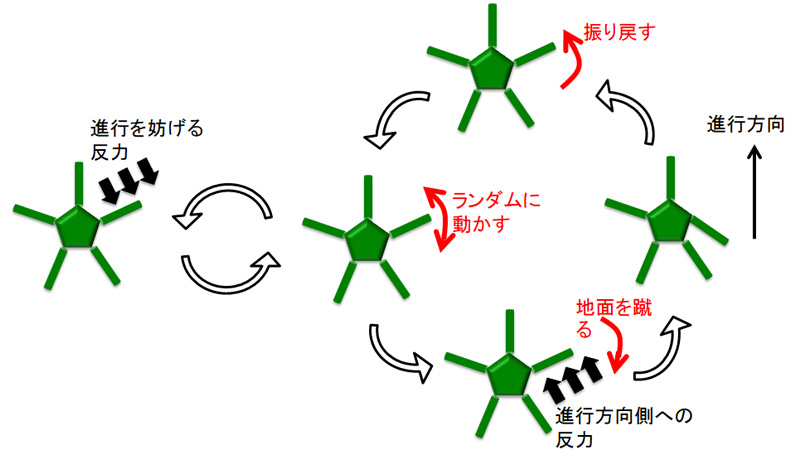
それを実現したのが、自切したクモヒトデの観察結果より得られた“各腕が環境から進行方向側に反力を受けたときにのみ地面を蹴る”という、極めてシンプルな数式で記述される自律分散制御則の設計だ。
-
損傷ごとにクモヒトデ(左)とクモヒトデ型ロボット(右)の動きが一致する

-
制御則の概要。脳に相当するメインコンピューターは存在せず、それぞれの腕が自身のセンサー情報を用いて単純な判断を行うだけで、適切な振る舞いをリアルタイムに生み出すことができる
腕の損傷に対してどのように適応した動きを見せるのかを解析。このデータを基に設計された自律分散制御則をクモヒトデ型ロボット「PENTABOT II」に実装したところ、腕をいかように破壊しても数秒以内に適応し、動き続けることが確認された。
これは単にクモヒトデを模倣したロボットが出来上がったということよりも、想定外の事象に対して即座に適応することが可能な人工物の設計手法を提案できたことに大きな意味を持つ。
これについて石黒教授は、「昨今AIが騒がれていますが、想定外の事象に対して即座に適応する能力は、依然として現在のAIでは実現できません。しかし、この設計手法は今後さまざまな人工物に応用可能です。今回の研究によって、これまで想定外の故障が発生した場合、対応や適応に数十秒~数分の時間が掛かっていた問題がクリアされることになり、災害現場などの予測不能な環境下においても機能することが可能な人工物の実現へと道が切り開かれると期待しています」と語っている。
今後、生物の特性を模したロボットが続々と誕生することで、私たちの暮らしのあり方にも大きな変化をもたらすかもしれない。クモヒトデ型ロボットの誕生は、その大きな第一歩になり得る可能性を秘めている。
-
この記事が気に入ったら
いいね!しよう -
Twitterでフォローしよう
Follow @emira_edit
text:安藤康之